坐标测量机探测误差的检测方法
三坐标测量机是一种三维尺寸的精密测量仪器,主要用于尺寸、形状和相互位置的检测。基于坐标测量原理,即将被测物体置于坐标测量机的测量空间,获得被测物体上各测点的坐标位置,根据这些点的空间坐标值,经过数学运算,求出被测的几何尺寸、形状和位置。因此测量精度是坐标测量机的首要要求,必须对坐标测量机定期进行校准。
坐标测量机的示值与被测量的真值之差称为坐标测量机的测量误差。由于坐标测量机是十分复杂的测量系统,产生测量误差的因素也非常复杂。坐标测量机产生测量误差的主要误差源包括测量机本身的误差,如测量机机构误差、测头探测误差、软件误差等,以及与测量条件相联系的各种因素,如测量方法、动态误差、力变形以及由于环境温度变化引起的误差等。
![]()
坐标测量机的校准是指在规定条件下,为确定坐标测量机所指示的量值与对应的标准所复现的量值之间关系的一组操作。由于测量的复杂性,同一个被测参数,不同的测量对象,可以有不同的测量方案。因此,坐标测量机的校准应是面向任务的校准。长度测量是一种典型的测量任务,长度测量示值误差和探测误差的组合可以作为评价坐标测量机性能和精度的指标。长度测量示值误差是使用坐标测量机测量长度实物标准器上两点间距离的指示值与真值的差,主要反映了坐标测量机的机构误差;探测误差是使用坐标测量机测量标准球半径的示值变化范围而确定的误差,主要反映了测头的各向异性、瞄准误差和作用直径的影响,提供了坐标测量机的方向特性参数。探测误差是影响测量不确定度的重要因素,对于不同的测头,探测误差也不同。
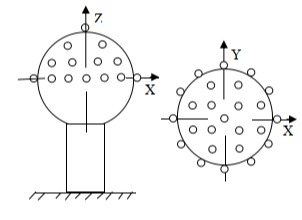
测头探测误差的检测原理和方法如下:选用一个球度误差很小的标准球,在不同的截面上测量标准球半球上25个点,用全部25个点计算出最小二乘球的中心,并分别计算出25个点对该球心的径向距离r,r的最大值和最小值的差即为探测误差。检测时要求各个截面上的探测点彼此错开,让测头从不同方向探测。根据《坐标测量机校准规范》,标准球必须是经校准的标准球,直径在10~50 mm之间,其形状误差应优于被测坐标测量机最大允许探测误差的五分之一,而且不应使用随测量机配备的、用于测头标定的球。
用最小二乘法计算最小二乘球的中心。最小二乘法确定球的几何特征的原理是:假定有一理想球使得被测球的各点到该理想球球心的距离的平方和为最小,那么该理想球的特征参数即为被测球的特征参数。
当探测误差不大于最大允许探测误差时,可以做出探测误差符合要求的评价。当探测误差大于最大允许探测误差时,允许对包括准备过程在内的所有测量过程重复一次;当测量结果仍然超出原定最大允许探测误差时,须重新确定新的最大允许探测误差。当最大允许探测误差不能满足应用需要时,应对坐标测量机进行修理,并重新进行校准。